


Figure7
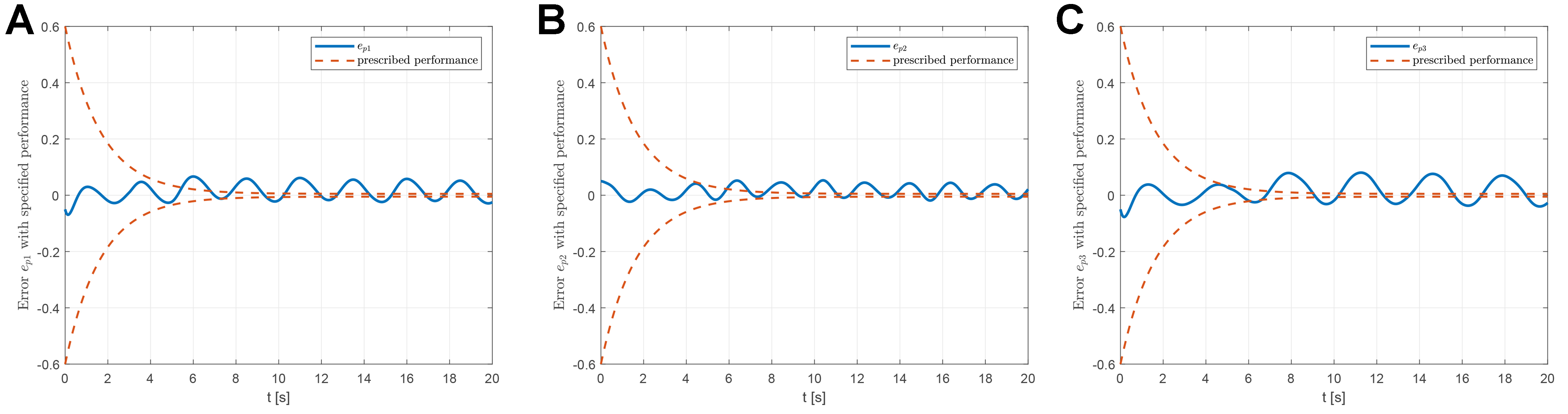
Figure 7. Tracking errors with specified performance under traditional PID control. (A) Attitude tracking error
Figure 7. Tracking errors with specified performance under traditional PID control. (A) Attitude tracking error


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


