


fig4
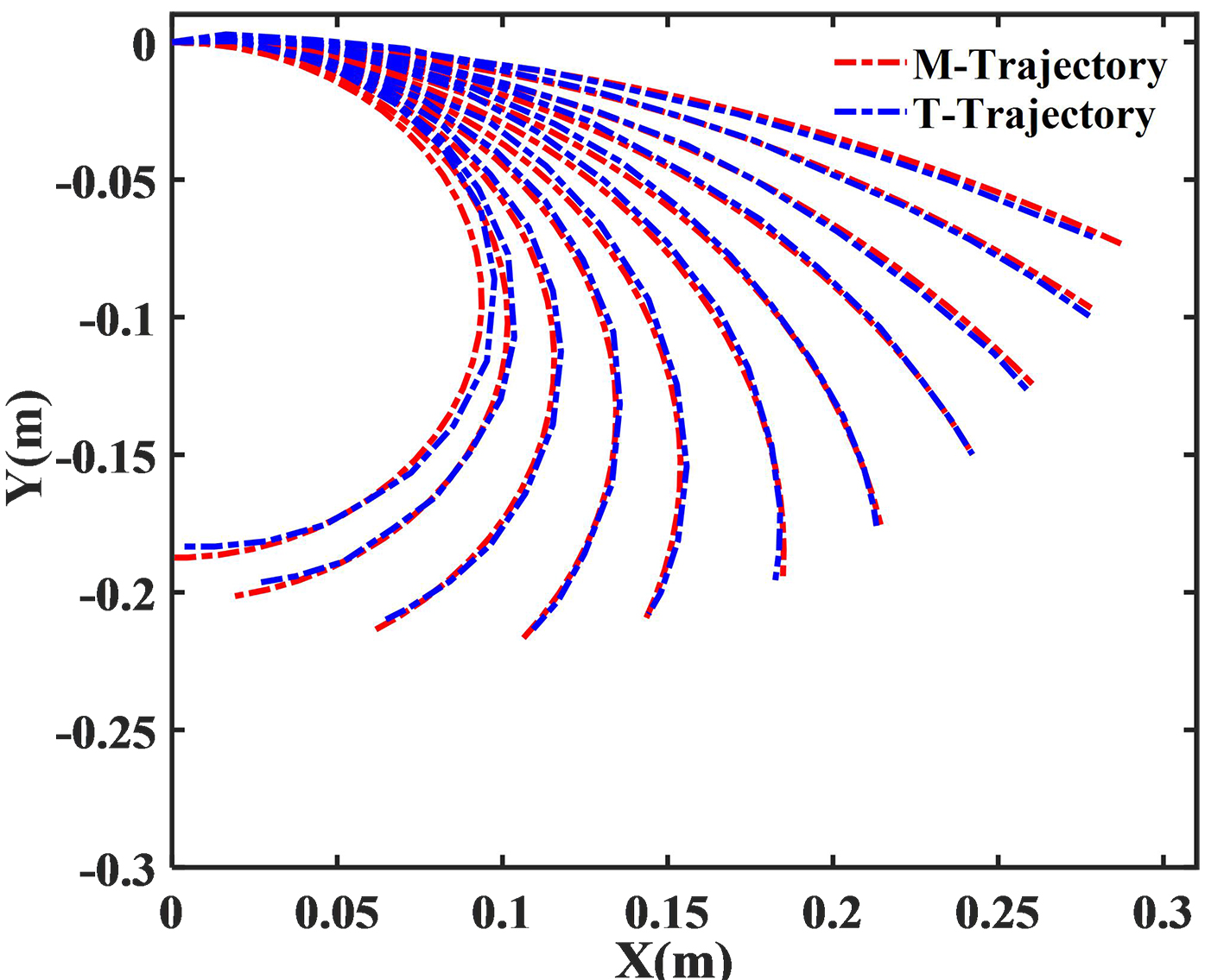
Figure 4. Comparison of simulated and experimental trajectories for the calibration of Young’s modulus E.
Figure 4. Comparison of simulated and experimental trajectories for the calibration of Young’s modulus E.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


