



fig4
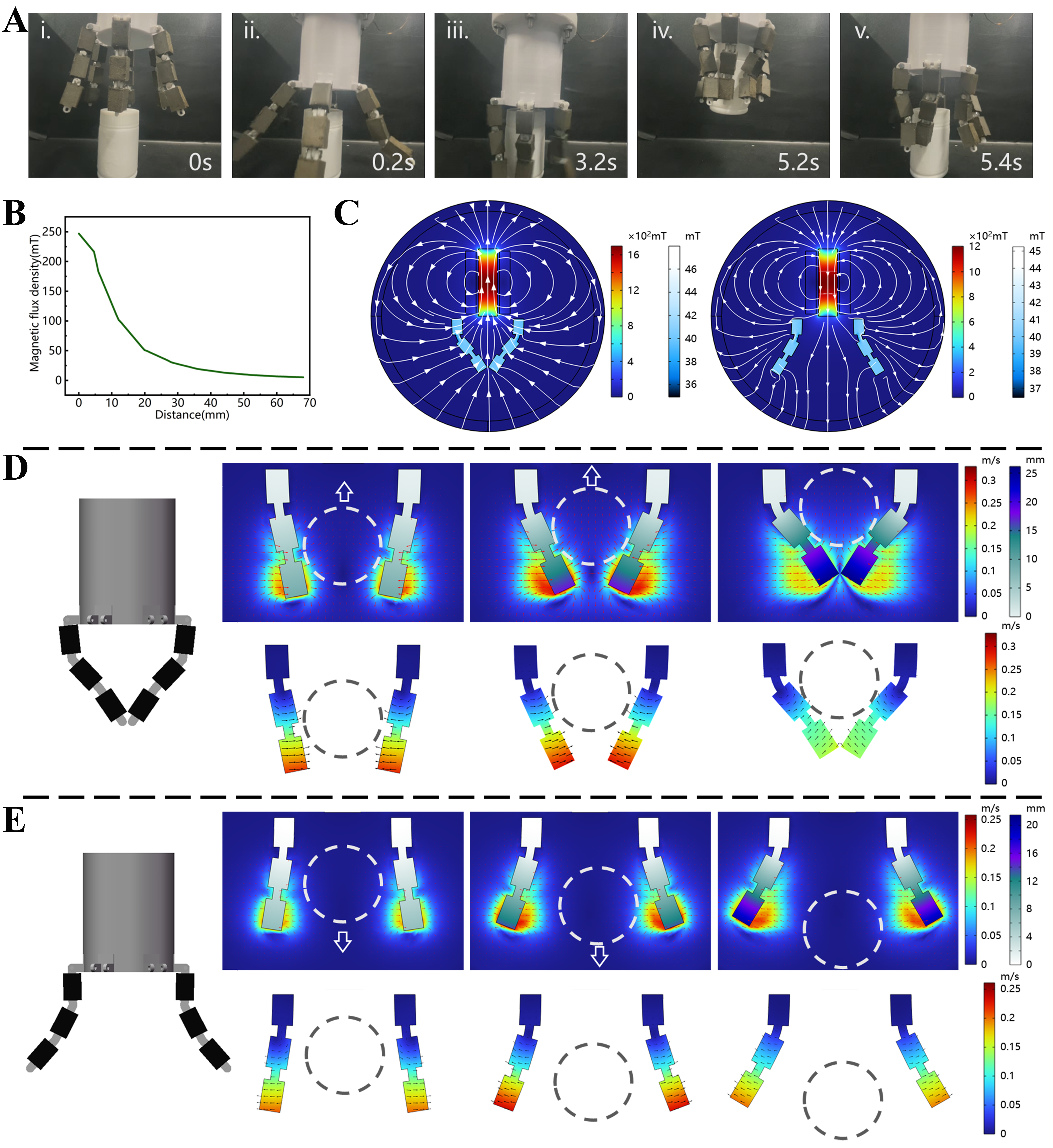
Figure 4. Simulation of gripper motion. (A) Preliminary experimental validation of the fabricated flexible gripper (cylindrical target capture); (B) Magnetic field strength distribution along the axis of the electromagnetic coil at varying distances from the coil’s end face; (C) Magnetic field distribution cross-section during gripper’s capture and stretch; (D) Fluid field dynamics and gripper displacement during the capture phase, along with the gripper’s own motion velocity; (E) Fluid field dynamics and gripper displacement during the stretch phase, along with the gripper’s own motion velocity.





