



fig4
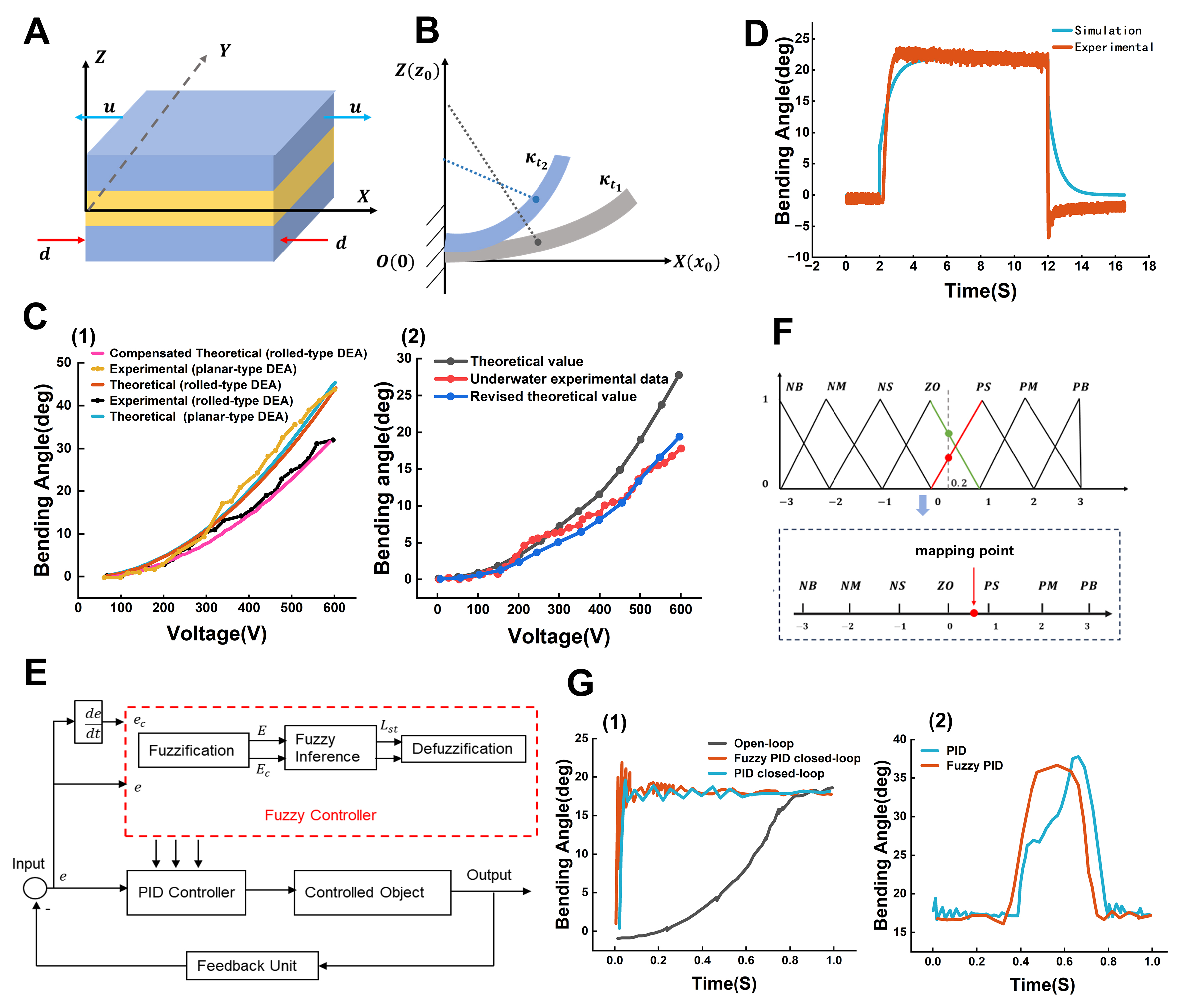
Figure 4. (A) Schematic diagram of sandwich structure of DEAs; (B) Schematic diagram of bending deformation under the constant curvature assumption; (C1) Comparison of theoretical and experimental results for planar and rolled DEAs in air. (C2) Comparison of theoretical and experimental results for rolled-type DEAs underwater; (D) Comparison of the step response of the Simulink simulation and experiment results of rolled-type DEAs underwater; (E) Schematic diagram of control system; (F) Schematic diagram of fuzzy PID control rule; (G1) Comparison of the performances among open-loop control, classical PID control, and fuzzy PID control. (G2) Comparison of responses between PID and fuzzy PID under disturbance. DEAs: Dielectric elastomer actuators; PID: proportional-integral-derivative; NB: Negative Big; NM: Negative Medium; NS: Negative Small; ZO: Zero; PS: Positive Small; PM: Positive Medium; PB: Positive Big.





