



fig3
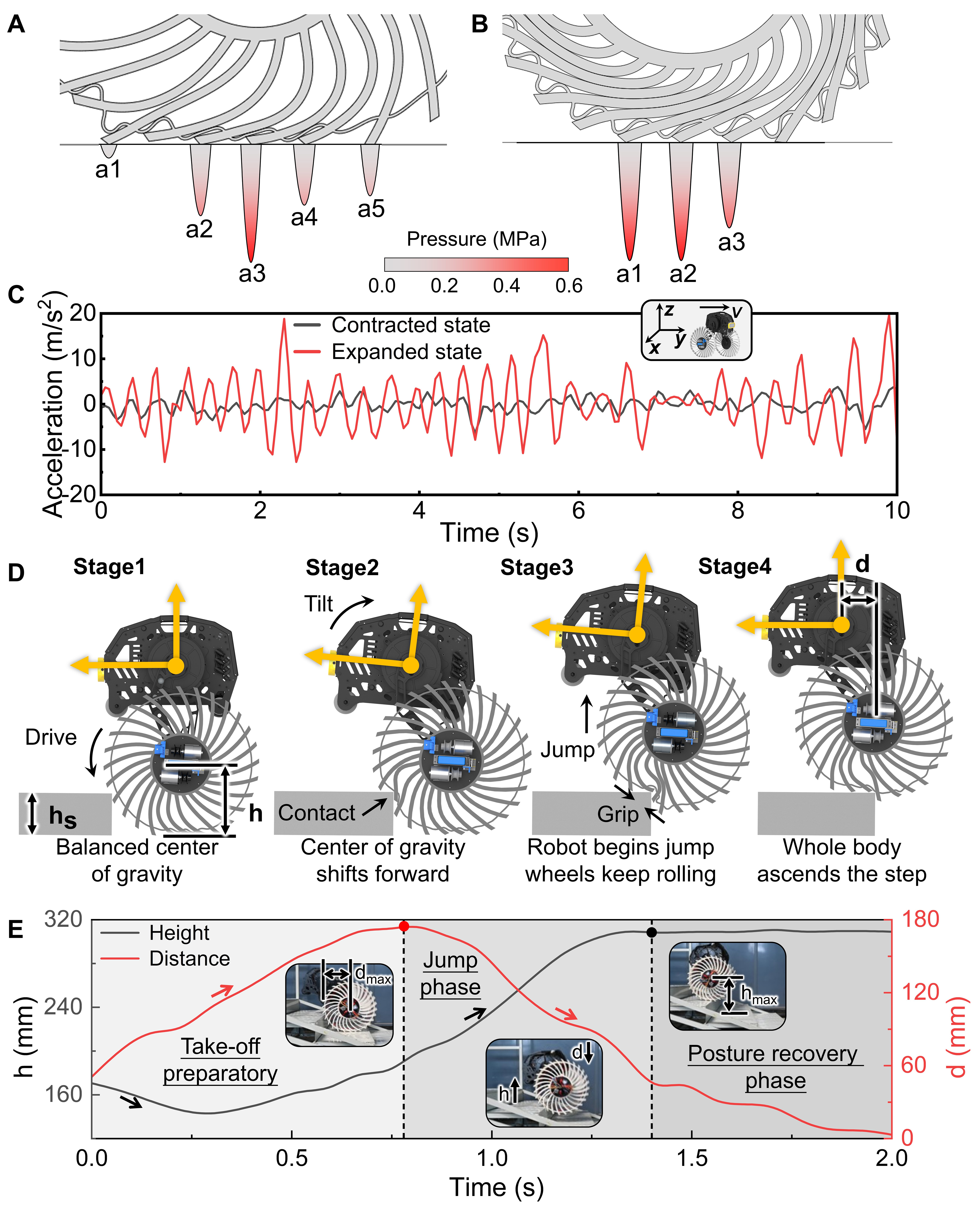
Figure 3. Ground-pressure analysis and locomotion performance of the robot with spiral wheels. (A) Ground-contact points and pressure distribution in the expanded configuration; (B) Ground-contact points and pressure distribution in the contracted configuration; (C) Z-axis acceleration comparison during high-speed travel in both configurations; (D) Stair-climbing strategy and sequence of robot movement; (E) Temporal variation of the wheel hub height and lateral body offset during stair climbing (photographed by the authors).





