



fig6
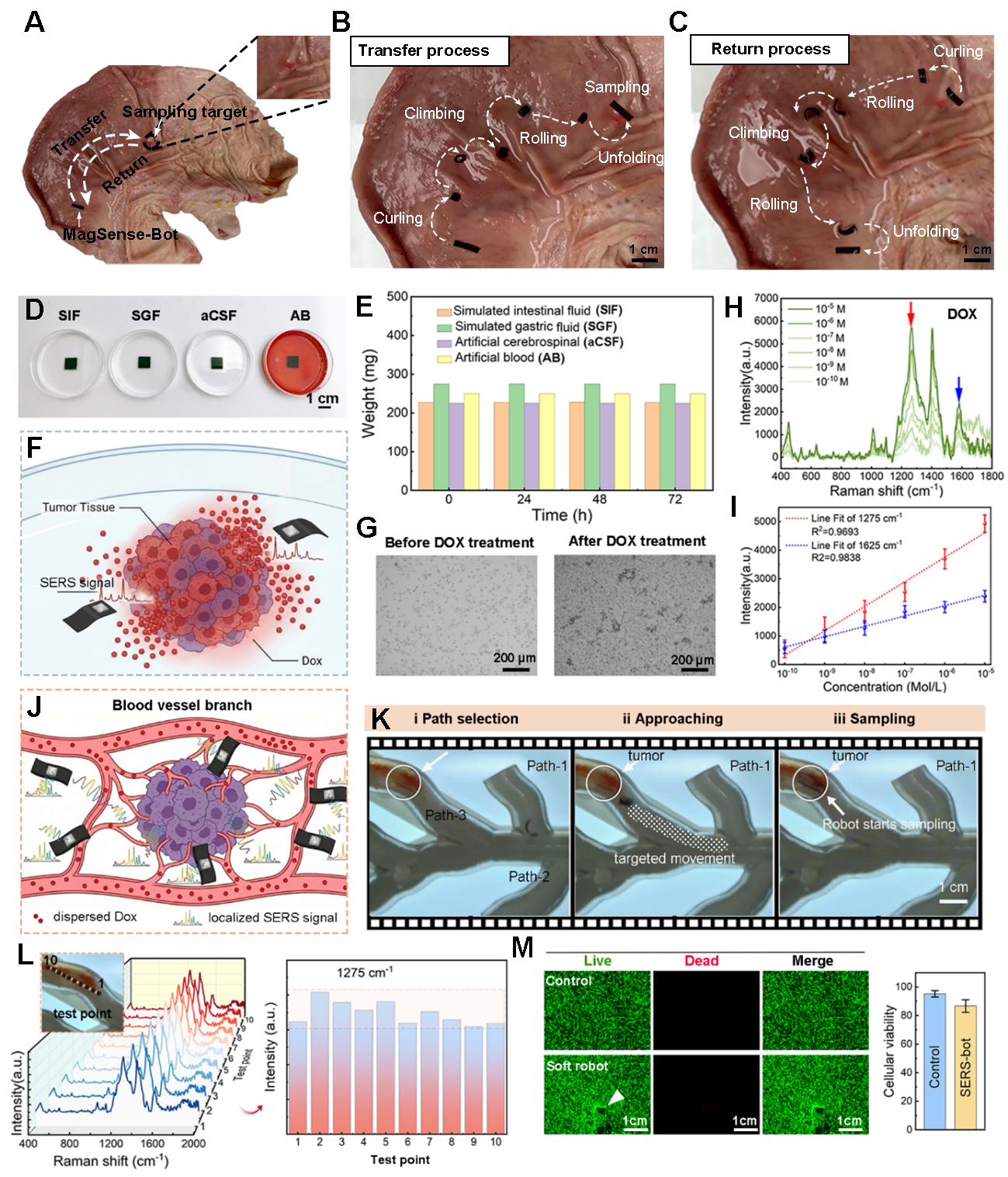
Figure 6. Stability, biocompatibility, and in situ feasibility of the MagSense-Bot for mobile SERS sensing in biologically relevant environments. (A-C) Deformation-assisted locomotion and surface sampling of the MagSense-Bot on ex vivo porcine gastric tissue; (D) Schematic illustration of the MagSense-Bot in representative physiological environments; (E) Weight changes of the MagSense-Bot after prolonged immersion (up to 72 h); (F) Schematic of magnetically guided delivery and conformal contact in a tumor-mimicking environment; (G) Microscopic images of HepG2 (purchased from Beyotime Biotechnology, Shanghai, China) cells treated before and after DOX at a concentration of 10-6M; (H) Representative SERS spectra acquired by the MagSense-Bot at varying DOX concentrations; (I) Evolution of the signals at 1,275 and 1,625 cm-1 for the DOX with different concentrations. Error bars represent the standard deviation (SD) of three repeated spectral intensity measurements collected from the same sample; (J) Schematic illustration of targeted navigation and localized SERS sampling; (K) Time-lapse snapshots extracted from video recordings; (L) Spatially resolved SERS spectra collected from ten randomly selected locations; (M) Cell viability assessment after incubation with functionalized MagSense-Bots. Data are presented as mean ± SD. Error bars represent standard deviation. SIF: Simulated intestinal fluid; SGF: simulated gastric fluid; aCSF: artificial cerebrospinal fluid; AB: artificial blood; SERS: surface-enhanced Raman scattering; DOX: doxorubicin.





